Mapping haptic gestures to swarm robots
by Sean Wang, Yoyo Yuan • 06-20-2023 #swarm-algorithms #robotics #haptics #ml
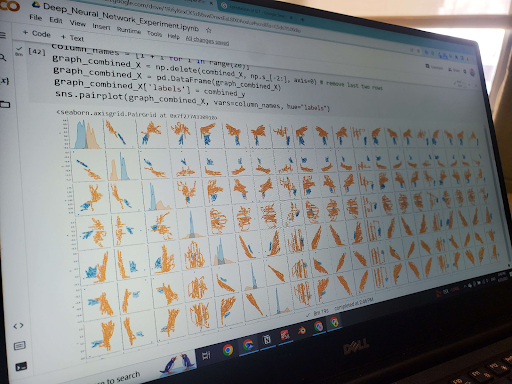
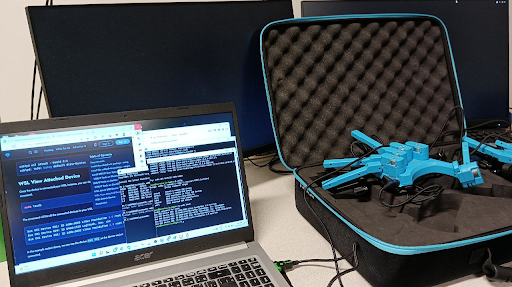
At UWaterloo ERABLab, we built a neural network that recognizes gestures of the Senseglove haptic hand and controls the motion of brushbots with Professor Gennaro Notomista. This involved learning linear algebra, some multivariable calculus, neural networks, the PyTorch framework, Linux and ROS. There was a more-than-expected amount of troubleshooting.
Related links from Yoyo's bookshelf
- RHex - ROBOTS: Your Guide to the World of Robotics
RHex is a bio-inspired, hexapedal robot designed for locomotion in rough terrain. It can drive over rocks, mud, sand,... - Robot motor learning shows emergence of frequency-modulated, robust swimming with an invariant Strouhal number | Journal of The Royal Society Interface | The Royal Society
Electronic supplementary material is available online at https://doi.org/10.6084/m9.figshare.c.7125496. Hankun Deng,... - [2505.24860] PB&J: Peanut Butter and Joints for Damped Articulation
Abstract:Many bioinspired robots mimic the rigid articulated joint structure of the human hand for grasping tasks, but... - LLARVA: Vision-Action Instruction Tuning Enhances Robot Learning
In recent years, instruction-tuned Large Multimodal Models (LMMs) have been successful at several tasks, including image... - (PDF) Swarm Intelligence Algorithms Evaluation
By using this site, you consent to the processing of your personal data, the storing of cookies on your device, and the... - [2011.04424] Playing optical tweezers with deep reinforcement learning: in virtual, physical and augmented environments
Abstract:Reinforcement learning was carried out in a simulated environment to learn continuous velocity control over...